Introduction
There is something attractive about a model aircraft. Whether it's a perfect scale model of a real aircraft or something a little more fun any model aircraft can be a rewarding process to build and fly. In choosing which wing to build some friends and I initially constructed Spec wings, which are part of a racing class of wings, and are a blast to fly, but the next build we wanted to go bigger. The Spec wing is about 30 inches and because we wanted bigger we stepped up to the 42" wing that is offered by Defiant. This wing is a sports cruiser with a large payload capacity and one hell of a presence when in the air.
Construction
Creating the Airframe
The instructions are simple enough and mainly require someone who is experienced to know all the steps required. This is why we did the Spec wings first in order to know the process of building these wings. The first step is to glue the airframe together, as the 42 comes in 3 pieces to minimize shipping cost. The 2 outer wing sections and the midsection are glued together using white gorilla glue as it expands and will provide a secure bond between the sections of the wing. After that, the fiberglass spars are embedded into the foam to give the wing rigidity and protect the shape. The spars are also secured with white gorilla glue and any excess glue is sanded down to the shape of the wing. Figure 1 shows the spar placement according to the instructions.
The motor bay is the next step, a small area is cut into the rear of the wing for the motor mounts to slot into. In this case, we are using a larger prop than the airframe could fit, so a portion of the wing sides was cut so that the prop could fit.
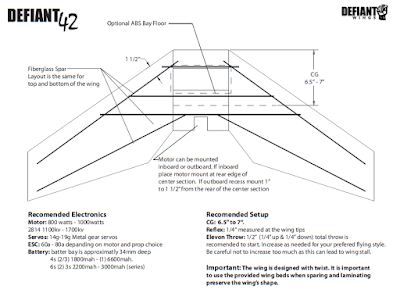 |
| Figure 1: Spar placement and motor mount location |
Covering the Airframe
After sanding down the excess glue the airframe should feel pretty solid but it still isn't ready for electronics yet. The edges and some of the spars are covered in a clear reinforced tape that has a string fabric running through the tape to provide a very strong tape and help hold the airframe together. After this step, the airframe is sprayed with spray adhesive and covered in a regular clear tape. This process starts at the back of the wing and slowly layers the tape forward. This prevents air from catching the tape and causing it to peel off midflight. Figure 2 is of my wing after this step, it is important to minimize the wrinkles in the tape at this stage as they will only get larger as more tape layers are added.
 |
| Figure 2: The wing covered with clear tape |
Once the covering is done the elevons can also be covered in this same process, spray adhesive and then colored tape. As the elevons are already smooth balsa wood the clear tape isn't needed and they can be covered with the color tape that fits the design of the wing, this part can be seen in Figure 6 further down.
Connecting the components
The wing has a few electronics that go with it. A motor, 2 servos, an electronic speed controller (ESC), a video transmitter (VTX), a flight controller, GPS, and finally a camera for the nose. The Major part of this project is connecting almost everything to the flight controller. By following the wiring diagram found on Maytek's website everything can be connected correctly. Figure 3 is of the wiring diagram, Figure 4 is of the correct connection points for the servos for a flying wing set up and Figure 5 is of my little brother, who has a lot more soldering experience, working on the board and soldering the connections.
A side note and "pro-tip" here would be to avoid using the pin connectors for the board and solder the wires right into the holes on the board without pre-tinning the holes as this will make it hard to get the wire into the connection and ensure a good solder.
 |
| Figure 3: The Wiring Schematic |
 |
| Figure 4: The Servo connections for the Wing |
 |
| Figure 5: Soldering the connections |
Embedding
Once everything is wired accordingly the components can be embedded into the wing. The easiest way to do this is with a hot knife and melting the foam out so that the component can fit. After the components are situated their wires can be embedded. Sometimes this step can be done before or during the connecting phase to ensure that a component has wires that are long enough.
For the servos, it is important to not connect them in a straight line based on the airframe but actually perpendicular to the joint connecting the elevons to the airframe. This will provide minimal resistance to the moving servo and not risk breaking the control surface or servo in a crash as any force applied to an eleven will simply force the servo to move and not pry it out of its bay, risking other components or damage to the body. The final layout of the embedded components can be seen in Figure 6.
 |
| Figure 6: Everything Embedded |
Extra Components
After the wing is wired up and basically ready to fly. Lids for the forward battery bay and secondary electronics bay can be designed. As the electronics bay has a lot of electronics inside it is expected to get very hot, this can be fixed by adding ducts and vents to channel air down to the electronics and escape vents to allow the air to leave the bay and not rip off the lid. This is where 3D printing is key allowing one to print these components. In the case of my wing, I used NACA ducts that were made on CATIA for another class and escape vents that were designed by the creator of the wing. As was pointed out by a friend the NACA ducts on my wing are technically ram-air ducts but this was to minimize the extra cutting and air channeling that would have been needed for a true NACA duct.
Another part was also 3D printed and these were skids to protect the bottom. These were printed at a 20% hex infill without a top and bottom layer in order to expose the infill and allow flexing for landing. All these extra 3D printed parts were hot glued to the wing and are very secure. Finally, as I realized the NACA ducts will produce a lot of extra force onto the secondary bay lid and in order to keep it from flexing 2 extra rods were pushed through the lids corrugation to give it some true strength to resist bending and flexing. Figure 7 is of the ducts on the wing and Figure 8 is of the skids.
 |
| Figure 7: The vent system designed for the electronics bay |
 |
| Figure 8: the skids |
Finalizing
After all the components are connected final taping and stickers may be added to give some personality to your wing. I have used a theme on my spec wing that was all triangles and it came out looking amazing so I did a similar design on the 42. After all the taping the vertical stabilizers are added on the end and it is completely done.
Conclusion
In a situation faced as we are facing today being stuck inside can be really boring, so building a model aircraft, can really help with some of that extra time. In total my wing took me about 2 weeks of time to build and for many people that'll help with a lot of the boredom. Finally flying the wing is something that is endless fun and one can fly it hundreds of times before the airframe will get worn out. Figures 9 and 10 are of the top and bottom of the final wing design and it finished, I call it Big Red
 |
| Figure 9: Top |
 |
| Figure 10: Bottom |
Parts List:
Motor- RC Timer BC3536/6 1250KV
ESC- Strix Rocket 65 Amp
Prop- APC 8x6
Battery- 3300 mah 4s
Servos- Turnigy TGY-811
VTX- TBS Unify Pro 32
Antenna- True RC side Feed
Camera- Foxeer Falkor V2